运想重工直臂式高空作业平台的电控系统介绍
直臂式高空作业平台是一种将工作人员和施工器材运载到控制制定指定位置,从事检修、安装等工作的直臂伸缩结构的高空作业设备 。随着我国造船、消防、港口建设、石油化工、市政建设等行业的迅速发展,对直臂式高空作业平台的需求越来越多 。
直臂式高空作业平台为伸缩臂架结构,能够利用自身动力在工作场地或场地之间短距离行走,操作控制一般分为转台控制和平台控制,如图1所示为直臂车高空作业平台。由于高空作业平台的施工特点,工人大部分时间都在平台上施工,平台控制为主要的控制方式,转台控制为辅助控制方式。

运想重工直臂高空作业平台系列的电控系统
如图2所示为我公司高空作业平台GTBZ20的电控系统拓扑结构图,电控系统由转台ECU、平台IO模块、转台显示器、传感器开关等输入信号以及电磁阀警示灯等执行机构组成。
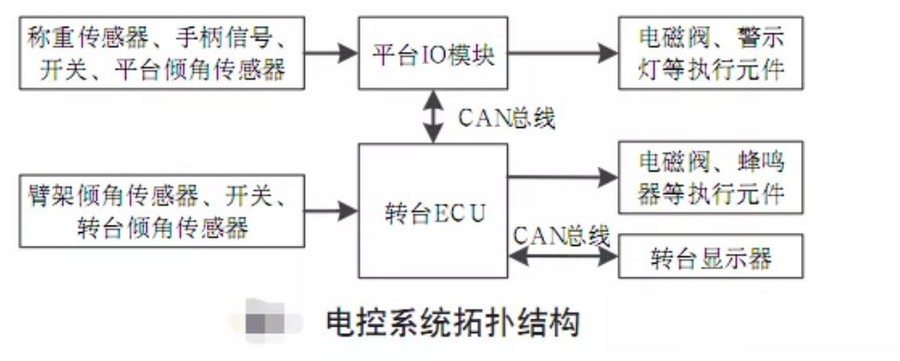
转台ECU是整车电控系统的控制中枢,接收开关信号、臂架倾角传感器以及转台倾角传感器等输入信号,逻辑运算之后,实现对转台控制电磁阀、蜂鸣器等执行元件的执行。转台显示器通过CAN总线与转台ECU通讯,实时监测整车的状态信息。
平台IO模块是转台ECU控制端口的远程扩展,操作平台上的平台控制箱上的手柄信号、开关信号以及平台倾角传感器、称重传感器等检测信号通过IO模块接收,通过转台ECU的逻辑运算,实现对平台控制电磁阀、控制面板警示灯等执行元件的控制。
电控系统关键硬件设计:转台硬件设计
电控系统关键硬件包含转台ECU、平台IO模块、显示器以及臂架长角传感器等。转台ECU作为整车控制的核心设备,除了具有高度数据处理、复杂逻辑运算外,还必须具备工程机械各种工况环境下的适应能力 。
如图3为转台ECU输入输出端口信息,其中DI为开关输入信号,DO为开关输出信号,PWM为高频脉冲输出信号。DI输入端口,各种操作开关的位置布置主要取决于需要实现的功能,DO与PWM输出端口,各种电磁阀的位置布置主要取决于执行机构所在位置。从转台操控箱面板操作,功能上可以实现转台回转、臂架收缩、臂架变幅、平台回转、平台调平以及曲臂变幅。
转台操控箱面板上发动机启动开关控制发动机的启动,并通过高低速开关调节发动机转速;电瓶泵开关控制电瓶泵的动作,防止发动机故障时应急使用;平台控制和转台控制通过切换面板上的钥匙开关操作,实现平台控制和转台控制在硬件上的互锁,提高了操作安全性。钢丝绳松弛检测、前方区域检测以及臂架缩到位检测为重要的检测传感器,分别用于判断臂架内钢丝绳松弛判断、车辆行驶方向是否朝前以及臂架是否处于收车状态。

转台硬件设计
如图4所示为平台IO模块端口布置,平台IO模块采用CAN总线方式与转台ECU通讯,实现了ECU的远程端口扩展,弥补了ECU端口的不足及远程控制。相比于平台系统采用ECU的控制方式,降低了电控系统成本;所有控制程序编制只需在转台ECU中操作,节省了控制程序编制时间。
相对于转台操控箱面板操作功能,平台操控箱面板大部分功能冗余控制,既可以实现转台操控箱面板转台回转、臂架收缩、臂架变幅、平台回转、平台调平以及曲臂变幅功能,又可以实现行走速度控制及转向控制。
由于高空作业平台大部分时间都是在平台操作,平台控制相对于转台控制相关动作的微动性要比转台控制好,具体体现在转台回转、主臂变幅以及行走动作改为手柄控制,比例电磁阀的开口大小会根据手柄角度的大小变化,更好地实现速度控制,提高了微动性能。
当然平台也可以实现发动机的启动与停止以及发动机的速度控制,提高泵的流量;载重量模式的选择,用于限制平台的作业范围;喇叭开关与照明开关分别用于主动提醒和夜间工作照明控制;脚踏开关是平台动作先导开关,用于保证平台误动作;行驶确认开关,用于行走非正前方向上的确认;平台主动防御监测开关,用于保护平台操作人员,防止出现被重物挤压情况的发生;平台倾角传感器是平台调平的重要检测设备,转台 ECU 接收信号后判断平台是否水平。

控制系统软件设计: 控制程序设计
控制系统软件部分通过CoDeSys进行编程,CoDeSys作为一款PLC编程软件平台,在移动式工程机械上应用非常广泛。
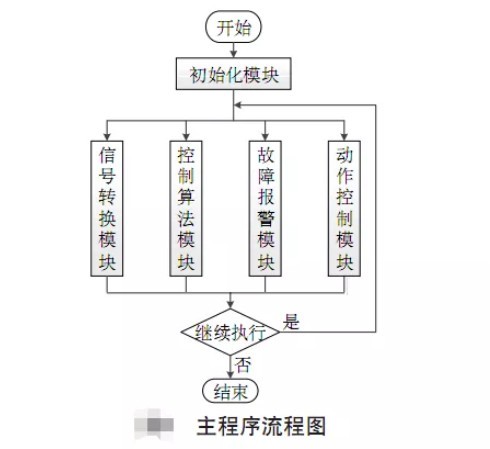
如图6所示为主程序流程图,其中初始化模块,主要包含传感器标定参数和掉电参数的读取以及相关参数的初始化;信号转换模块用于AD值转换、IO端口信号处理以及CAN总线的信号读取与传递;控制算法模块用于控制算法的计算,如平台调平算法、信号过滤算法等;故障报警模块是正常故障的汇总模块,ECU根据报警信息减小或停止危险方向的动作;动作控制模块主要包括臂架动作、转台回转动作以及行驶转向等整机动作逻辑控制。
显示器组态设计
显示器作为人机界面交换的窗口。如图7所示为显示器界面,主要由主界面、传感器参数设置界面、发动机信息界面、端口查询界面、CAN总线监控界面以及故障代码查询界面等构成。

主界面用于监控臂架状态,如平台角度,臂长及臂架角度等;传感器参数界面用于对部分传感器的标定,如臂架角度传感器;发动机信息界面用于查询发动机的状态信息,如油温、故障代码;端口查询界面用以显示ECU端口状态信息;总线监控界面能够实时显示控制系统的总线通信状态;故障代码查询界面用于主界面出现故障代码时的信息查询。
针对直臂高空作业平台的工作特点,提出了一种 ECU 增加扩展 IO 模块的电控系统,通过转台ECU集中控制。从电控系统结构、关键硬件设计、控制系统软件设计三个方面对电控系统进行了细致分析。市场应用表明,相比于转台和平台均采用ECU的控制方式,降低了成本,提高了程序编程效率及调试效率,电控系统安全可靠。
免责声明:本文援引自厂商或其他媒体,与铁甲网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
不想错过新鲜资讯?
微信"扫一扫"